GWでは、実家に帰り兄や中学校の先生に久しぶりに会ったりと楽しい時間を過ごしました。
でも、実家へ帰ってから兄が買い物に出かけていたので、待つまでの間、ドローンを飛ばして空撮をしていました。
何度か実家の周辺は飛ばしたことがあるので、以前と同じところから離陸してみましたが、今回は少し距離を伸ばしてみようと、少し高度を上げて西方面へ・・・
電波ロス(コントロール電波強度不足)が生じたら、オートリターンで帰って来るので、気にも留めていなかったのが、そもそもミスでした。
実は、2日の日別の河川敷で飛行させていた時、オートリターン高度の設定を20mに下げていました。
その設定前は80mだったから、高いよな~って思って下げたんです。
しかし、今度は山間の場所だから最短直線距離で戻って来るので、途中に林があればアウトです。
もちろん、障害物センサーが付いているのですが、キャリブレーションに失敗していたので、OFFにしたままでした(´;ω;`)

こんなところを飛ばしたんですよね。

スタート地点から500m程移動したところで右カーブ!
右手前は小高い林があり、そのまま進めば見通しから外れます。
そうです。見通しエリアから外れ、通信が途絶えました。
そこで、Autoリターンが起動します。
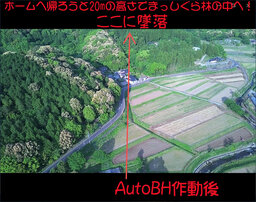 そう!林の方へ20mの高度でまっしぐらなのです(笑)
そう!林の方へ20mの高度でまっしぐらなのです(笑)
←※Autoリタ―ンが起動しホーム方向に向きを変えた直後
さすがに焦りましたが、車でロスト付近まで行き、林の持ち主(私の1年先輩です)に了解を頂いて、コントローラーのGPSデータ表示を基に雑木林の傾斜面を駆け上がりました。
 10mぐらいの距離まで近づいたとき、愛機のピーピーとなるシグナルですぐ発見できました。
10mぐらいの距離まで近づいたとき、愛機のピーピーとなるシグナルですぐ発見できました。
木の枝に引っかかってたらどうしようと思っていましたが、コントローラーで表示が1.3mとなったいたので、多分地面に落ちているだろうと考えていましたが、実際も樹木の葉がクッション代わりになった様で、機体の損傷もなく無事でした。
オートリターンの高度設定は良く考えて設定しておかないとまずいですね。いい勉強になりました。
因みに、オートリターンはこれまで何度も実践・練習をしていたのですが、やはり飛行場所状況を把握し、慎重に設定をしないといけません。

